kinematic model of skid steer with slip velocities A probabilistic motion model for SSWMRs capable of accurately estimating the distribution of robot positions and velocities in response to tire skid and slip. A convex . Features: 21HP Kohler EFI petrol engine for efficient performance. 325KG high lift capacity relative to weight class for effective material handling. All-wheel drive for superior traction on various terrains. Optional narrow wheel and hub set for access in tight spaces. Robust chassis design lowers center of gravity for improved stability.
0 · wheeled kinematic model
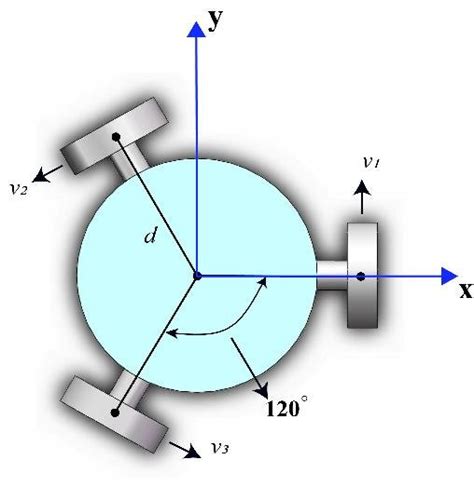
1 · kinematic model
2 · 4 wheel skid steering robot
Learn how the next generation of Cat mini excavators are designed to meet your needs for performance, comfort, control and service. See how customers like Samuel Portaud use them for vineyard work and enjoy the stick steer, air conditioning and cruise control options.
A kinematic model of a skid-steered wheeled vehicle maps the wheel velocities to the vehicle velocities and is an important component in the development of a dynamic model.2.1 Introduction. In this section kinematic and dynamic model of four-wheel skid-steering mobile robot is presented. We refer to the real experimental construction consists of two-wheel .
In this paper, we develop an analysis and experimental kinematic scheme for a skid-steering wheeled vehicle based-on a laser scanner sensor. The kinematics model is .
A probabilistic motion model for SSWMRs capable of accurately estimating the distribution of robot positions and velocities in response to tire skid and slip. A convex .A kinematic model of a skid-steered wheeled vehicle maps the wheel velocities to the vehicle velocities and is an important component in the development of a dynamic model.
This article describes an improved kinematic model that takes these factors into account and verifies the model in a variety of working conditions, including different terrains .A kinematic model that explicitly includes the geometric properties of the robot reduces the burden of calibration, gives insight to the kinematic behavior of the platform and
wheeled kinematic model
This work proposes a new kinematic model capable of slip prediction for skid-steer wheeled mobile robots (SSWMRs) that outperforms the state-of-the-art in terms of both .

A kinematic model of a skid-steered wheeled vehicle maps the wheel velocities to the vehicle velocities and is an important component in the development of a dynamic model.A kinematic model provides an estimate of the robot’s velocity given the pose and velocity of its joints, e.g. wheel velocities in the case of a wheeled mobile robot.
A kinematic model of a skid-steered wheeled vehicle maps the wheel velocities to the vehicle velocities and is an important component in the development of a dynamic model.
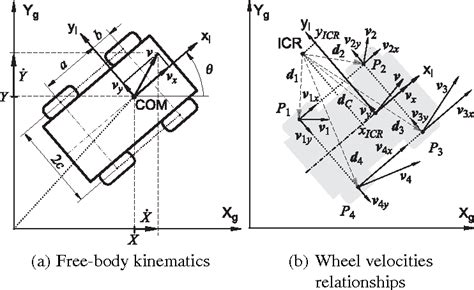
2.1 Introduction. In this section kinematic and dynamic model of four-wheel skid-steering mobile robot is presented. We refer to the real experimental construction consists of two-wheel differentially driven mobile robots namely MiniTracker 3 (see Fig.1) [9]. In order to simplify the mathematical model of SSMR we assume that [2]
kinematic model
In this paper, we develop an analysis and experimental kinematic scheme for a skid-steering wheeled vehicle based-on a laser scanner sensor. The kinematics model is established based on the boundedness of the instantaneous centers of rotation (ICR) of treads on the 2D motion plane.
A probabilistic motion model for SSWMRs capable of accurately estimating the distribution of robot positions and velocities in response to tire skid and slip. A convex optimization formulation to combine the GP outputs from different terrains allowing the motion model to be used for diverse, potentially unseen terrains.A kinematic model of a skid-steered wheeled vehicle maps the wheel velocities to the vehicle velocities and is an important component in the development of a dynamic model.
This article describes an improved kinematic model that takes these factors into account and verifies the model in a variety of working conditions, including different terrains and asymmetric loads, for two different wheeled skid-steered platforms.A kinematic model that explicitly includes the geometric properties of the robot reduces the burden of calibration, gives insight to the kinematic behavior of the platform and
This work proposes a new kinematic model capable of slip prediction for skid-steer wheeled mobile robots (SSWMRs) that outperforms the state-of-the-art in terms of both translational and rotational prediction error on a dataset composed of more than 6 km worth of trajectories traversed by a skid -steer robot.A kinematic model of a skid-steered wheeled vehicle maps the wheel velocities to the vehicle velocities and is an important component in the development of a dynamic model.
A kinematic model provides an estimate of the robot’s velocity given the pose and velocity of its joints, e.g. wheel velocities in the case of a wheeled mobile robot. A kinematic model of a skid-steered wheeled vehicle maps the wheel velocities to the vehicle velocities and is an important component in the development of a dynamic model.2.1 Introduction. In this section kinematic and dynamic model of four-wheel skid-steering mobile robot is presented. We refer to the real experimental construction consists of two-wheel differentially driven mobile robots namely MiniTracker 3 (see Fig.1) [9]. In order to simplify the mathematical model of SSMR we assume that [2] In this paper, we develop an analysis and experimental kinematic scheme for a skid-steering wheeled vehicle based-on a laser scanner sensor. The kinematics model is established based on the boundedness of the instantaneous centers of rotation (ICR) of treads on the 2D motion plane.
4 wheel skid steering robot
A probabilistic motion model for SSWMRs capable of accurately estimating the distribution of robot positions and velocities in response to tire skid and slip. A convex optimization formulation to combine the GP outputs from different terrains allowing the motion model to be used for diverse, potentially unseen terrains.A kinematic model of a skid-steered wheeled vehicle maps the wheel velocities to the vehicle velocities and is an important component in the development of a dynamic model.
This article describes an improved kinematic model that takes these factors into account and verifies the model in a variety of working conditions, including different terrains and asymmetric loads, for two different wheeled skid-steered platforms.A kinematic model that explicitly includes the geometric properties of the robot reduces the burden of calibration, gives insight to the kinematic behavior of the platform and This work proposes a new kinematic model capable of slip prediction for skid-steer wheeled mobile robots (SSWMRs) that outperforms the state-of-the-art in terms of both translational and rotational prediction error on a dataset composed of more than 6 km worth of trajectories traversed by a skid -steer robot.
step for cat skid steer
swing vs overhead door skid steer
A step up from compact excavators, large excavators boast operating weights between 14 and 16 metric tons (28,000 – 32,000 pounds). These machines are built for heavy-duty applications and large-scale projects, like commercial and .
kinematic model of skid steer with slip velocities|4 wheel skid steering robot